소프트 로봇용 4D 프린팅 소재

©2022 Fashion and Textile Research Journal (FTRJ). This is an open access journal. Articles are distributed under the terms of the Creative 52 Commons Attribution Non-Commercial License (http://creativecommons.org/licenses/by-nc/4.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
Abstract
This paper aims to investigate 4D printing materials for soft robots. 4D printing is a targeted evolution of the 3D printed structure in shape, property, and functionality. It is capable of self-assembly, multi-functionality, and self-repair. In addition, it is time-dependent, printer-independent, and predictable. The shape-shifting behaviors considered in 4D printing include folding, bending, twisting, linear or nonlinear expansion/contraction, surface curling, and generating surface topographical features. The shapes can shift from 1D to 1D, 1D to 2D, 2D to 2D, 1D to 3D, 2D to 3D, and 3D to 3D. In the 4D printing auxetic structure, the kinetiX is a cellular-based material design composed of rigid plates and elastic hinges. In pneumatic auxetics based on the kirigami structure, an inverse optimization method for designing and fabricating morphs three-dimensional shapes out of patterns laid out flat. When 4D printing material is molded into a deformable 3D structure, it can be applied to the exoskeleton material of soft robots such as upper and lower limbs, fingers, hands, toes, and feet. Research on 4D printing materials for soft robots is essential in developing smart clothing for healthcare in the textile and fashion industry.
Keywords:
4D printing, shape-shifting behavior, various dimensional shape-shifting, hinge auxetic structure, phneumatic auxetic structure키워드:
4D 프린팅, 형상이동 거동, 차원별 형상이동, 힌지 어그제틱 구조체, 공압식 어그제틱 구조체1. 서 론
소프트 로봇은 웨어러블 로봇 중 재료에 따라 엘라스토머, 직물, 겔과 같은 유연한 소재로 이루어진 로봇을 말한다. 이러한 소프트 로봇은 자세제어, 상황인식, 동작신호 생성등 웨어러블 기능을 포함하여, 군용, 산업 작업용, 재난 구조용, 재활치료용, 일상생활 보조용 등으로 용도가 전개되고 있다(Xing et al, 2020). 최근 섬유패션분야와 관련된 웨어러블 의류의 연구 중 로봇의 기술 현황 조사 및 개발 방향 제안연구, 보행보조 재활 로봇 착용에 따른 쾌적성 평가, 군인의 작업 실태에 기반한 웨어러블 로봇 개발 방향 탐색 등이 있으나, 대부분 인간공학이나 동작성과 관련되어 있다(Kim et al, 2019). 특히 착용시 동작 용이성, 쾌적성, 기능성을 갖는 스마트 기능의 소프트 소재에 대한 요구가 증가하고 있다(Hao et al., 2022, Kim et al., 2020; Pinskier & Howard, 2022; Wang & Chortos, 2022). 이에 3D 프린팅 제조 기반으로 기능성 소재를 포함한 4D 프린팅 제조공정을 확립하여 메타구조체 기반 소프트 제품 개발을 통해 헬스케어용 스마트 의류제품과 재활치료용이나 일상생활 보조용 소프트 로봇 제품 개발에 적용하는 연구가 진행되고 있다(Hao et al,, 2022; Lee, 2022).
소프트 로봇 분야에서 요구되는 4D 프린팅 기술은 온도나 습도 등의 외부 자극 요소에 의해 3D 프린팅된 사물이 시간에 따라 스스로 물성이나 형상을 변화할 수 있게 만드는 기술을 말한다(Momeni et al., 2017; Kuang et al., 2019; Rayan et al., 2021). 4D 프린팅 기술을 이용하면, 자극 반응형 스마트 소재를 잘 설계된 3차원 구조로 프린팅할 수 있기 때문에, 3D 프린팅된 제품의 정적인 특징을 극복하고 외부 환경에 스마트하게 적응하는 능동적인 제품들을 생산할 수 있다. 소프트 로봇용으로는 어그제틱 구조체(auxetic structure)에 대한 연구가 활발하다(Dorsey et al., 2022; Eguchi et al., 2022; Ou et al., 2018, Papadopoulou et al., 2017; Ren et al., 2018; Wagner et al., 2017).
4D 프린팅 소재는 초기에 ‘4D 프린팅 = 3D 프린팅 + 시간’으로 정의되었으며, 3D 프린팅 구조의 형태, 속성 또는 기능은 시간의 함수에 따라 변경이 가능하다고 정의되었다. 4D 프린팅 기초요소는 3D 프린팅 출력환경(3D printing facility), 자극제(stimulus), 자극에 반응하는 재료(smart or stimulus- responsive material), 상호작용 구조(interaction mechanism), 수학적 모델링(mathematical modeling)으로 구분할 수 있다. 4D 프린팅은 환경적 에너지를 통한 자체 조립(self-assembly), 재구성(reconfiguration) 및 복제(replication)를 위해 구조를 활성화할 수 있는 새로운 응용 분야를 개척하는 것이다. 4D 프린팅 구조의 잠재적 응용은 자가 수리(self-repair), 다기능(multi-functionality), 자체 조립 분야로 나눌 수 있다. 자체 조립 영역은 나노 규모에서 우주 규모까지 활용 가능하며, 응용분야로는 의료용, 우주 항공 분야 등이다. 다기능 영역에서는 감지 및 작동을 재료에 직접 통합하여 외부 전기적 시스템이 필요하지 않는 것이 특징이다. 자가 수리 분야는 재사용 및 재활용과 관련하여 엄청난 이점을 가지며, 자가 치유 파이프 및 자가 치유 하이드로겔 등으로 응용할 수 있다. 이 때 4D 프린팅 소재의 형상 변화 거동(Shape-shifting behaviors)(Hager et al., 2015; Lauff et al., 2014; Liu et al., 2016; Peraza-Hernandez et al., 2014; Ryu et al., 2012; Sun & Huang, 2010; Therien-Aubin et al., 2013; Wang & Zhao, 2014; Xie, 2010; Yu et al., 2012; Zhou et al., 2015; Zhou et al., 2016)과 온도나 습도 조건에 따라 차원별 형상이동 성능과 특성에 대한 보고(Bakarich et al., 2015; Ge et al., 2014; Jamal et al., 2013; Kokkinis et al., 2015; Kuksenok & Balazs., 2016; Mao et al., 2015; Mutlu et al., 2015; Raviv et al., 2012; Sydney Gladman et al., 2016; Tibbits et al., 2014; Tibbits, 2014; Villar et al., 2013; Wu et al., 2016; Yu et al., 2015; Zhang et al., 2016)가 다수 진행된 바 있다.
4D 프린팅 어그제틱 구조체(auxetic structure)는 NPR(negative poisson’s ratio)을 나타내는 기계적 메타 물질 그룹이다(Papadopoulou et al., 2017; Bertoldi et al., 2017; Kolken & Zadpoor, 2017). 기존의 재료와 달리 어그제틱 재료를 한 방향으로 늘리거나 혹은 압축하면, 얇아지거나 혹은 두꺼워지며, 특히 수직 방향으로 더 두꺼워지거나 또는 더 얇아진다. 최초의 어그제틱 물질의 발견 이후 많은 연구에서 어그제틱 특성을 나타내는 물질의 수많은 구조적 디자인을 보여주었다(Bertoldi et al., 2017; Kolken & Zadpoor, 2017). 연구에 따르면 NPR을 보유하는 것 외에도 어그제틱 재료는 전단 저항(shear resistance)(Choi & Lakes l, 1992), 압입 저항(indentation resistance)(Lake & Elmas, 1993) 및 파괴 인성(fracture toughness)(Choi & Lakes, 1996)과 같은 다른 향상된 기계적 특성을 나타낸다. 또한 소음 및 진동 흡수 특성(sound and vibration absorption properties)이 향상된다(Chen & Lakes, 1996). 어그제틱 구조는 그 구조가 평면 수축(planar shrinking)을 넘어 변형할 수 있는 기능을 제공하는 설계 매개변수(design parameters)가 있다. 이러한 새로운 셀 구성은 재료가 파라메트릭 방식(parametric)으로 공간적으로(spatially) 비틀리고(twist) 구부릴 수(bend) 있는 것이다. Wang et al.(2014)의 연구는 변형 가능한 재료를 설계하는 데 알려진 오리가미 구조(origami structure)의 수학적 프레임 워크(mathematical framework)를 제시했다. 이 작업에서 영감을 받아 다양한 변형 세트를 갖고 하나의 DoF로 제한되는 연결 기반 구조(linkage-based structure)를 제시하고 있다. 소프트 로봇용 디자인의 핵심인 경량성(light weight)과 유연성(flexible) 측면에서 볼 때, 어그제틱 구조체는 소프트 로봇의 유연한 본체를 구성하는데 핵심 요소로서 중요성이 부각되고 있다(Pinskier & Howard, 2022).
본 고에서는 소프트 로봇용 4D 프린팅 소재와 어그제틱 구조체에 대한 연구 동향을 정리하였다. 첫째, 4D 프린팅 소재의 형상 변화 거동을 형상 변화와 형상기억 소재, 이중, 삼중, 다중 형상기억 효과, 접힘과 굽힘, 표면지형별로 구분하여 알아보았다. 둘째 차원별 형상이동 유형에 따른 특성과 물성에 대해 알아보았다. 셋째, 4D 프린팅 메타구조체 중 힌지 구조체를 적용한 KinteX 와 키리가미 구조체를 기본으로 한 공압형 어그제틱 구조체의 설계, 출력 공정 및 용도를 알아보았다.
2. 4D 프린팅 소재의 형상변화 거동 (Shape-shifting behaviors)
4D 프린팅 소재의 형상 이동 거동은 접힘(folding), 굽힘(bending), 꼬임(twisting), 선형 혹은 비선형 확장/수축 (linear or nonlinear expansion/contraction), 표면 말림(surface curling) 및 표면 지형적 특성의 재생 (generation of surface topographical features)을 포함한다.
이러한 형상은 주름(wrinkle or crease), 찌그러짐 (buckle) 등을 발생시킨다. 이 형상은 일차원에서 일차원(1D-1D), 일차원에서 이차원(1D-2D), 이차원에서 이차원(2D-2D), 일차원에서 삼차원(1D-3D), 이차원에서 삼차원(2D-3D), 삼차원에서 삼차원(3D-3D)으로 변형한다. 시간이 지남에 따라 1D에서 1D로 모양이 변하는 구조도 4D프린팅 구조로 간주한다. 이는 이 구조가 처음 3D 프린팅으로 출력된 다음 시간이 지남에 따라 변형이 되기 때문이다. 4D 프린팅에서 형상이동 유형을 다음과 같이 요약하였다.
2.1. 형상변화와 형상기억 소재 (Shape-changing vs. shape-memory materials)
형상변화 물질은 자극을 가한 직후에 형태가 바뀌고 자극이 제거되면 즉시 영구적인 형태로 돌아가는 것으로 정의할 수 있다(Zhou et al., 2016). 이러한 변형은 선형 부피 팽창(linear-volume expansion) 및 수축(shrinkage)과 같은 단순한 아핀 기하학(affine geometry) 으로 제한된다. 아핀 기하학은 거리, 넓이, 각을 제외한 나머지에 의하여 변하지 않는 성질을 갖는 것을 말한다.

Illustration of the difference between one-way and two-way shape memory materials(Hager et al., 2015).
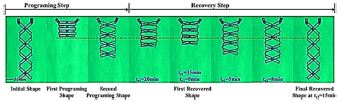
반면 형상기억소재가 가지는 형상기억효과(shape-memory effect, SME)는 두 단계를 포함한다(Sun & Huang, 2010; Zhou et al., 2015, Zhou & Sheiko., 2016). 1단계는 구조를 기본 형상에서 변형시킨 후 준안정 임시 형상(metastable temporary shape)으로 유지하는 프로그래밍 단계이고, 2단계는 적절한 자극으로 원래 형태로 복구하는 단계이다.
따라서, 형상기억소재는 적절한 자극이 주어질 때까지 일시적으로 형상을 유지할 수 있고, 형상변형 소재는 형상을 유지할 수 없다. 형상기억효과는 일방향 형상기억소재(One-way shape memory materials)와 두방향 형상기억소재(Two-way shape memory materials)로 구분할 수 있다. 일방향 형상기억소재는 비가역적이다. 원래 형상으로 회복된 후 새로운 단계로 일시적인 형상으로 변형을 해야한다. 이 문제는 가역적인 방법으로 형상을 변경할 수 있는 두방향 형상기억효과로 해결할 수 있다.
2.2. 이중, 삼중, 다중 형상기억 효과(Dual, triple, and multi shape memory effects)
형상기억소재는 자극반응재료(stimulusresponsive materials)로 분류할 수 있다. Hager et al.(2015)는 형상기억소재는 영구 및 일시적 형상 사이의 변형이 발생하는 것에 의해, 영구적인 형태는 “기억”된다고 정의하였다. 이 중 형상기억소재 (dual-SME materials)는 하나의 영구 형상(permanant shape)과 하나의 임시 형상(temporary shape)을 포함하는 반면, 삼중 형상기억소재(triple-SME mataerials)는 하나의 영구형상과 두 개의 임시 형상을 갖는다. 유사하게, 다중 형상기억 소재(multi(n)-SME material)는 하나의 영구 형상과 (n-1)의 임시 형상을 갖는다. 다중 형상기억소재는 Sun et al.(2010), Xie (2010), Yu et al.(2012), Thérien-Aubin et al.(2013), Li et al.(2016)의 연구에서 소개되었다.

Illustration of dual and triple SME(Hager et al. 2015), where A is the permanent shape.
2.3. 접힘과 굽힘 (Folding vs. bending)
접힘과 굽힘 거동의 차이는 미묘하다. 굽힘은 부드러운 곡면과 연계된 변형인 반면, 접힘은 좁은 영역(narrow hinge area) 내에서 발생하여 예리한 각도(sharp angle)와 관련한 국소적인 변형이다(Ryu et al., 2012; Peraza-Hernandez et al., 2014). 이러한 국소적인 접힘등이 연결되어 굽힘이 발생한다(Liu et al., 2016). 즉, 굽힘은 분포된 곡률과 관련되어 있고, 접힘은 더 국소적이다(Lauff et al., 2014). 이것은 Fig. 3에 나타내었다.

The difference between folding and bending(Liu et al., 2016).
2.4. 표면 지형 (Surface topography)
표면 지형은 평면에서 표면의 국부 편차를 나타내는 것이다. 전형적인 형태는 주름(wrinkling 혹은 creasing)과 비틀림(buckling)을 포함한다(Fig. 4). 이러한 주름과 비틀림 형상의 특징은 일반적으로 압축 하중 조건에서 발생한다는 것이며, Wang과 Zhao는 이러한 표면 지형의 변화량을 정량적으로 연구하였다. Maxwell 안정성 기준(Maxwell stability criterion)에 기반한 접근 방식을 통해 이러한 기능의 다양한 유형의 시작 및 성장을 예측할 수 있다.

Surface topography; (a) types of wrinkling, creasing, and buckling and (b) SEM images(Liu et al., 2016).
3. 차원별 형상이동 유형 (Dimensional shape-shifting types)
3.1. 1차원에서 다차원으로의 형상이동
Table 1은 1차원에서 다차원으로의 형상이동을 1D-1D 팽창/수축, 1D-2D 접힘/굽힘, 1D-3D 접힘(1D-to-3D folding)으로 구분하여 정리한 것이다.

The illustration of 1D-to-nD shape-shifting types
3.1.1. 1D-1D 팽창/수축 (1D-to-1D expansion/contraction)
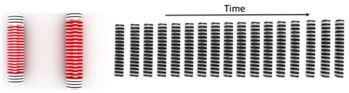
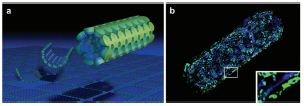
Raviv et al.(2014)와 Yu et al.(2015)는 4D 프린팅 공정을 통해 1D에서 1D로의 선형 팽창/수축을 시연한 바 있다. Table 1(a)의 상단은 Raviv et al.(2014)의 연구로, 자극물은 수분이고, 4D 프린팅 구조체는 단단한 디스크층(rigid discs)과 활성 하이드로젤 층(active hydrogels)을 교대 배열한 것이다. 이 구조체를 물에 담그면, 하이드로겔 층은 팽윤될 것이고, 단단한 디스크층은 변형없이 그대로 유지될 것이다. 팽창성 하이드로겔층(expandable hydrogels) 과 단단한 디스크층의 비율을 조정함으로써, 그 구조는 요구하는 최종 길이로 선형 형상 이동 거동(linear shape-shifting behavior)을 보일 수 있다. Table 1(a)의 하단에 나타난 Yu et al.(2015)의 연구에서는 자극물은 열을 기반으로 1D-1D 팽창/수축을 제시하였다. 열자극에 의한 선형 형상이동 거동은 형상기억주기를 얻을 수 있다. 여기서 열응답 형상기억고분자(thermoresponsive shape memory polymers(SMP)는 보통 프로그래밍과 회복 단계를 포함한다.
3.1.2. 1D-2D 접힘/굽힘 (1D-to-2D folding/bending)
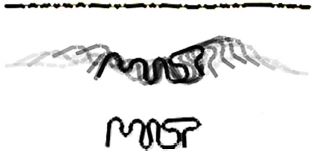
Table 1(b) 상단의 Tibbits(2014) 연구에서는 물에 노출될 때 주름과 비틀림으로 인해 "MIT" 형태가 되도록 재료의 변형을 설계하였다. 강성부(rigid)와 활성부(active) 의 두 가지 유형의 재료를 사용하였는데, 활성부는 하이드로겔을 사용하여 물에 침지되었을 때 팽윤되는 반면, 강성부는 물에 손상되지 않는 재료를 사용하였다. 이 재료의 흡수율의 차이는 재료의 응력 불일치(stress mismatch)를 제공하고 전체 모양이 특정 방향(specific direction)으로 변형할 수 있도록 한다. 이 구조 내의 강성부와 활성부 재료의 위치와 부피는 다양한 형상이동 방향으로 이동할 수 있도록 설계할 수 있다. Table 1(b) 하단의 Tibbits et al.(2014)의 연구에서는 자기 굽힘에 의한 1D-2D 사인파형 형상이동(1D-to-2D sinusoidal shape-shifting) 을 나타내었다. 이 구조는 강성과 활성 물질을 교대로 배열한 선형 스트립 구조이다. 이 구조는 물에 잠기면 사인파 모양으로 변형할 수 있으며, 자기 굽힘 메커니즘(self-bending mechanism)으로 1D-2D 형상 이동을 보인다.
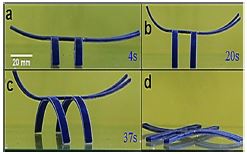
3.1.3. 1D-3D 접힘 (1D-to-3D folding)
Tibbits(2014)의 연구에서는 자기 접힘에 의한 1D-3D 접힘 거동을 나타내고 있다. 이 1D-3D 접힘 구조는 각 와이어 프레임의 경첩구조(wireframe hinge)에 의한 것으로, 두 개의 단단한 디스크층이 하이드로겔층 안에 내장되어 있고, 이는 두 개의 단단한 가닥(rigid strands)으로 연결되어 있다. 이 두 개의 단단한 디스크는 자유 형상 이동의 최대각도(maximum degree of free shape-shifting)를 제한할 수 있다. 예를 들면, 두 가닥의 변형을 90°에서 멈추게 하여 사면체 모양을 만들고, 두 개의 단단한 디스크는 이 최종위치에 서로 접촉하도록 한다. 이 때 추가적인 접힘은 막을 수 있다.
3.2 2차원에서 다차원으로의 형상이동
Table 2는 2차원에서 다차원으로의 형상이동을 2D-2D 굽힘, 2D-3D 굽힘/접힘/꼬임/표면말림/표면지형변화/굽힘과 꼬임 등으로 구분하여 정리한 것이다.
The illustration of 2D-to-nD shape-shifting types
3.2.1. 2D-2D 굽힘 (2D-to-2D bending)
Table 2(a)는 2D-2D 굽힘을 나타낸 것이다. Villar et al.(2013)은 4D 바이오 프린팅 액적(droplet) 네트워크에서 2D에서 2D로 자기 굽힘을 설명하였다. 4D 바이오 프린팅 액적 네트워크는 수많은 액적으로 형태가 직사각형 네크워크를 형성한 후 원형으로 구부림이 가능한 것이다. 이러한 형상이동 거동은 액적의 삼투압 차이(differences in osmolarity of the droplets)를 기반으로 한다. 삼투압이 높은 액적은 팽윤하고, 더 낮은 삼투압 액적은 수축한다. 이러한 형상은 삼투압 구배(osmolarity gradient) 가 0이 될 때까지 모양이 계속 변한다.
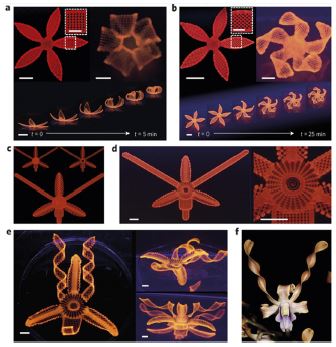
3.2.2. 2D—3D 굽힘 (2D-to-3D bending)
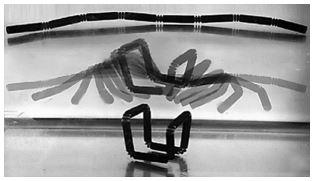
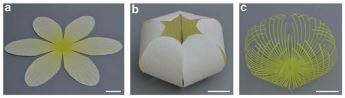
Table 2(b)는 2D-3D 굽힘 거동에 대한 사례를 정리한 것이다. 먼저 Wu et al.(2016)은 2D-3D 굽힘 거동을 능동형 가대(active trestle), 능동형 나선형(active helix shape), 능동형 파형(active wave shape), 스마트 곤충형(smart insect-like structure), 스마트 후크(smart hook) 등 다양한 구조체에 적용하였다. 이러한 거동은 열을 자극으로 하는 굽힘 변형 프로그램을 적용한 것이다. Table 2(c)의 첫번째 사진은 Zhang et al.(2016)의 연구로, 꽃과 같은 구조나 정사각형 구조를 만들어 2D에서 3D로의 자체 굽힘 동작을 설명한 것을 나타내었다. 여기서 2D에서 3D로의 자체 굽힘은 열 자극으로 형상이동 거동을 진행할 수 있다. Table 2(c)의 두번째로 제시한 형상기억 주기 메커니즘에서 이전의 외력을 유지하면서, 고온에서 외력을 가하거나, 저온으로 냉각할 필요가 없이 2D-3D 굽힘 거동을 나타내었다. 이러한 형상 이동 거동은 활성물질과 비활성물질의 열팽창계수(thermal expansion coefficients of the active and non-active materials)의 차이에 의해 가능한 것이다. 또한 Table 2(c) 두번째 그림 오른쪽 사진은 정사각형 배열의 4개의 주기적 셀로 구성된 2D 시트가 3D 주기 구조체로 자기 굽힘이 되는 것으로 보여주고 있다. 각 셀 구조는 하나의 중앙영역과 4개의 직사각형으로 이루어져 있다. 이 형상이동거동 메커니즘도 두 물질의 열팽창계수의 차이에 의해 변형되는 것이다. Table 2(c)에는 자기굽힘에 의한 바이오 오리가미형 2D-3D 변형을 나타낸 것도 있다. Jamal et al.(2013)은 조직공학에 사용하기 위해 형상 변형을 이용하였다. 이 형상 이동은 하이드로겔과 강성 소재의 팽윤도 차이에 의해 가능하다고 한다. 또한, 꽃모양의 물방울 네트워크가 속이 빈 구로 변형되는 2D-3D 자기 굽힘 거동을 나타내기도 하는데, Villar et al.(2013)의 연구결과에서 액적의 삼투압 구배에 의해 이러한 형상 변형을 가능하게 하였다.
3.2.3. 2D-3D 접힘(2D-to-3D folding)
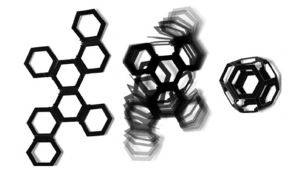
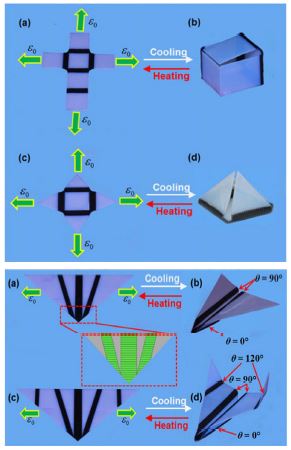
Table 2(d)는 자기접힘 2D-3D 형상 이동으로 4면체나 8면체(truncated octahedron)를 만드는 것을 나타낸 것이다. Tibbits(2014) 및 Tibbits et al.(2014)에서는 수중에서 팽윤거동이 다른 강성 및 활성 물질간의 응력 불일치에 의한 형상이동 거동이 가능한 것을 확인하였다. Ge et al.(2013)의 연구에서는 오리가미 형태 내 2D-3D 접힘 거동을 나타내고 있는데, 오리가미 박스, 피라미드, 비행기의 형상을 자기 접힘 거동으로 변형할 수 있을을 보여주었다. 마지막으로 Mao et al.(2015)는 순차적으로 자기 접힘 2D-3D 형상이동을 확인하였고, 이 두 프로세스 모두 형상이동 거동은 보통의 형상기억주기 프로세스로 열에 의해 진행할 수 있다.
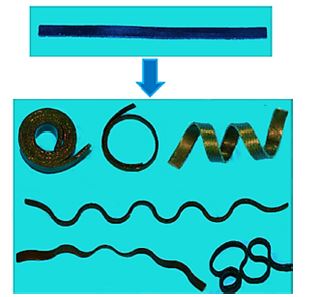
3.2.4. 2D-3D 꼬임 (2D-to-3D twisting)
Table 2(e)는 2D-3D 꼬임에 의해 다양한 각도의 나선상 헬리컬 구조(helical structure)를 나타낸 것이다. Zhang et al.(2016)은 꼬임을 유도하기 위해 특정 각도로 섬유형의 형상을 3D 프린팅하고, 활성부 섬유의 출력 각도를 조정하여 최종 꼬임 각도를 변경하였다. 열팽창 계수가 차이나는 두가지 물질을 이용하여 형상 이동 거동을 나타내었다.
3.2.5. 2D-3D 표면 말림 (2D-to-3D surface curling)
Table 2(f)는 표면 말림에 의한 2D-3D 사인형 형상 이동 구조체와 표면 말림에 의한 2D-3D 헤어 평형 이동을 나타낸 것이다. Tibbits(2014) 및 Tibbits et al.(2014)는 수중에서 수학적 사인곡선 표면을 생성할 수 있는 확장 가능한 재료의 상부 및 하부 세그먼트(upper and lower segments of expandable materials)가 교대로 있는 표면 격자 구조(surface grid structure)를 제작하였다. 이 형상 이동 거동은 수중에서 강성 및 활성 재료의 팽윤도 차이에 의해 나타나는 응력 불균형으로 가능하다. Raviv et al.(2014)은 다양한 구조체의 2D-3D 표면 말림 형상을 확인한 바 있다. 이 메커니즘도 재료의 팽윤도 차이에 의한 응력 불균형으로 설명할 수 있다. 마지막 그림은 Ge et al.(2013)의 연구로 복잡한 조각으로 이루어진 평평한 시트가 불균일한 곡률모양으로 변형되는 2D-3D 표면 말림 형상 이동 거동을 나타낸 것이다. 여기에서 형상 이동 거동은 열 조건의 프로그래밍과 회복 단계의 형상기억주기를 이용하여 얻을 수 있다.
3.2.6. 2D-3D 표면 지형 변화 (2D-to-3D surface topographical change)
Table 2(g)는 표면 지형변화에 따른 2D-3D 형상 이동을 보여주는 사례이다. 표면지형 변화는 물 속에서의 팽윤도 차이가 있는 강성 재료와 활성 재료간의 응력 불균형으로 나타날 수 있고, 시간의 함수로 표면 지형이 변화할 수 있다는 것을 나타낸 것이다(Tibbits et al., 2014).
Table 2(h)는 복잡한 꽃 형태가 갖는 2D-3D 굽힘과 꼬임 거동을 나타낸 것이다(Sydney Gladman et al., 2016). 이는 생체모방 4D 프린팅 프로세스에서 이용할 수 있다. 이 형상 이동 거동은 활성 및 강성 물질의 수중 팽윤도의 차이에 의해 나타난다. Table 2(h) 하단 그림은 다양한 2D-3D 굽힘과 꼬임 거동을 보여주고 있다(Ge et al., 2013). 이는 온도 프로그래밍과 회복 단계를 적용한 일반적인 형상기억 주기를 이용하여 형상 이동 거동을 나타내는 것이다.
3.3. 3차원에서 다차원으로의 형상이동
Table 3은 3차원에서 다차원으로의 형상이동을 3D-3D 굽힙과 3D-3D 선형/비선형 거동으로 구분하여 정리한 것이다.
The illustration of 3D-to-nD shape-shifting types
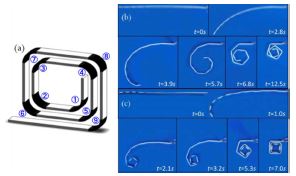
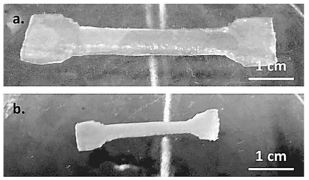
Table 3(a)는 바이오 프린팅된 구조체에서 3D-3D 굽힘 거동을 보여주는 것이다(Kokkinis et al., 2015). 상단 그림은 적절한 용매 내에서 용해되는 재료의 굽힘 거동을, 하단 그림은 열가소성 엘라스토머로 만든 의수의 3D-3D 굽힘 거동을 나타낸다.
Table 3(b)는3D-3D 선형 거동을 보여주는 것이다. 상단 그림에서 나타난 형상이동 거동은 냉수 혹은 온수에서 열반응성 하이드로겔의 선형 자유 팽윤 혹은 수축이 가능한 것을 보여준다. 반면 하단의 그림은 3D-3D 비선형 거동의 전역 혹은 국소적인 수축과 굽힘 거동을 보여주는 것으로 왼쪽은 3D-3D 굽힘 거동을, 오른쪽은 3D-3D 비선형 수축을 나타낸다.
4. 4D 프린팅 어그제틱 구조체
최근 연구되고 있는 어그제틱 구조체 중 힌지 접힘 구조체를 기본으로 하는 KinetiX 구조체(Ou et al., 2018)와 키리가미 구조체를 기본으로 한 공압형 어그제틱 구조체(Eguchi et al., 2022)를 소개하고자 한다. 각각의 모델링, 3D 프린팅 출력, 적용 사례 등을 중심으로 아래에 요약하였다.
4.1. 힌지 접힘의 KinetiX 구조체
힌지 매개변수가 단일 장치의 변형(single unit’s deformation)을 변경하는 방법은 기하학적으로 설명할 수 있고, 이러한 방법은 힌지 접힘성(hinge foldability)과 단일 DoF(degree of freedom) KinetiX 시스템의 기초이다. 변형 가능한 구조를 설계할 때 이러한 매개변수의 잠재력을 추가로 탐색하기 위해 3D 프린팅으로 단일 DoF를 유지하면서 이러한 단위로 테셀레이션된 모듈 세트를 시제품으로 제작할 수 있다.
Fig. 5는 평면 및 공간 변환의 5개 단일 단위체를 견고한 회전 힌지로 출력한 것이다. 출력물의 물리적 변형은 기하학적 예측 및 시뮬레이션과 일치한다.

Five fabricated unit of planar and spatial transformation. (a) the basic unit; (b) planar transformation of uniform scaling; (c) planar transformation of shearing; (d) spatial transformation of bending; (e) spatial transformation of twisting(Ou et al., 2018).
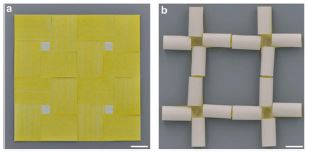
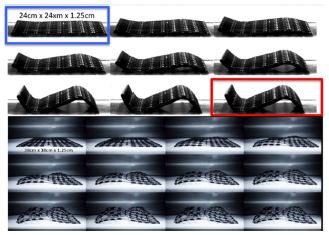
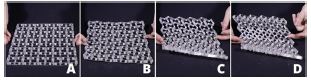
M = 1로 제한된 DoF를 유지하면서 단일 변환 단위를 동일한 단위와 결합하여 더 큰 스케일링 또는 전단 변환을 형성할 수 있다. 이는 두 가지 유형의 평면 변환 단위인 균일 스케일링(uniform scaling)과 전단(shearing)이 가능하다. 힌지의 한 단위가 변형되면 전체 시스템이 그에 따라 변형될 수 있다. Fig. 6은 단일 단위 테셀레이션으로 인쇄된 대형 KinetiX 패널을 보여준다. 힌지의 위치를 파라메트릭 방식으로 조정하여 점진적인 변형 변화(gradual change of the transformation)를 만들 수 있다.

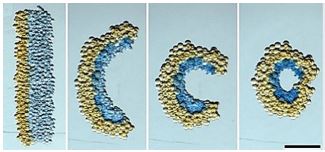
A 15 by 15 identical unit KinetiX panel can be fabricated by simple propagation. The piece exhibits the known auxetic effect. (a) Printed piece; (b) After compression; (c) The hinge configuration(Ou et al., 2018).
Fig. 7은 좌측 및 우측에서 위쪽으로 전단되는 구조를 나타낸다. 공간 변환 단위로 선이나 표면 구조를 구성하려면 평면/공간 변환 단위와 결합해야 한다. 그 이유는 두 개의 유닛이 있는 구조에서 하나의 변형이 다른 하나의 변형을 반대 방향으로 유발하기 때문이다.

An 8 by 8 gradient unit KinetiX panel. The hinges gradually shift their position from left to right. (a) Printed piece; (b) After compression; (c) The hinge configuration.(Ou et al., 2018)
Fig. 8은 KinetiX를 나타낸 것이다. KinetiX는 평면 및 공간 변환을 모두 용이하게 하므로, Ou et al.(2018)은 두 개의 서로 다른 KinetiX 장치를 결합하여 큰 선 및 표면 테셀레이션을 생성하는 실험을 하였다. 실험을 위해 가변 힌지 면내 위치(hinge in-plane position), 힌지 면내 회전(hinge in-plane rotation) 또는 힌지 면외 회전(hinge out-of-plane rotation)의 단위를 다른 단위와 결합할 수 있는 가능한 두 단위 테셀레이션을 만들었다.

KinetiX transformable unit composite table. Spatial transformation includes bending and twisting. Planar transformation includes uniform scaling and shearing(Ou et al., 2018).
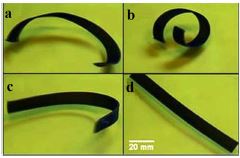
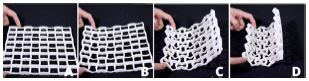
Table 4는 2단위 테셀레이션의 적용 사례를 요약한 것이다. 2단위 테셀레이션은 두 개의 서로 다른 단위를 하나의 그리드 시스템에 미리 할당하여 원하는 위치에서 서로 다른 변환을 얻을 수 있다. 2단위 테셀레이션을 기반으로 원하는 변환을 달성하기 위해 여러 단위를 갖도록 선택할 수도 있다. Ou et al.(2018)은 이러한 테셀레이션을 이용하여 압축 시 변형되는 4개의 샘플을 설계하여 출력하였고, 아래와 같은 변형을 보여주었다.
Prototypes of various 1D and 2D tessellations(Ou et al., 2018)
- • 힌지 면외 회전 + 힌지 면내 회전으로 컬링 라인 생성 (Table 4(a))
- • 힌지 면외 회전 + 힌지 면내 위치를 사용하여 굽힘 선 생성 (Table 4(b))
- • 힌지 면내 회전 + 힌지 면내 위치를 사용하여 비틀림 선 생성 (Table 4(c))
- • 힌지 면외 회전 + 힌지 면내 위치를 사용하여 굽힘 표면 생성 (Table 4(d))
- • 힌지 면외 회전 + 힌지 면내 위치를 사용하여 컬링 표면 생성 (Table 4(e))
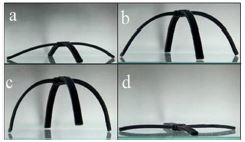
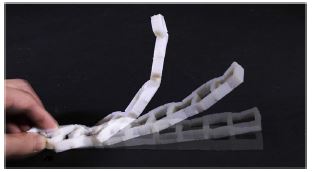
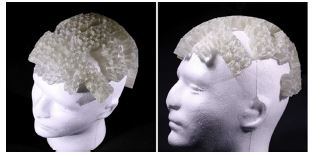
KinetiX의 변형 조정 가능성을 보여주기 위해 컨포머블 헬멧을 제조하고 시제품을 제시하였다(Table 5). 헬멧은 출력 시간을 절약하기 위해 평평하게 인쇄되며 단일 DoF로 머리를 감싸도록 접을 수 있다.
Conformable helmet(Ou et al., 2018)
다음과 같은 과정을 거쳐 이 헬멧을 디자인하였다.
(1) 스티로폼 마네킹의 머리부분을 종이로 감싸서 겹치는 부분을 잘라냄
(2) 머리부분을 본 뜬 종이를 평평하게 놓았을 때 늑골과 같은 형태를 얻을 수 있음
(3) KinetiX 유닛, 벤딩 유닛 및 기본 유닛을 리브 유사 구조로 적용함
(4) 3D 모델링 파일을 시뮬레이션 시스템에 입력하고 접히는 결과를 확인함
(5) 시뮬레이션 결과를 기반으로 단위 설계를 반복함
(6) 4번의 반복 끝에 실물 크기의 스티로폼 머리에 거의 맞는 헬멧을 제조함
4.2. 공압형 어그제틱 구조체 (phnuematic auxetic structure)
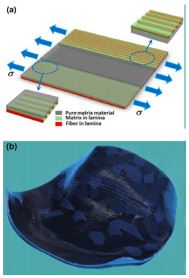
주로 오리가미(origami)/키가미(kirigami) 구조로 음의 푸아송 비를 갖는 구조는 인체에 들어가는 제품부터 건축, 공간구조물과 같은 대규모 제품에 이르기까지 널리 사용되고 있다. 오리가미 구조는 평평한 표면에서 접어서 조밀한 상태(compact state)까지 원하는 형상을 만들 수 있다. 키리가미 구조는 다양한 커팅을 적용하여 크기나 형상을 다양하게 확장할 수 있다. 최근 역설계 디자인(reversible design) 분야에서, 멤브레인과 스켈레톤을 공압형 액추에이터를 공압적으로 연결부위를 변형하여 조절할 수 있게 되었다. 키라가미 구조를 사용하여 역설계 방법을 기본으로 하여, 공기 수축(air deflation)에 의해 변형을 최적화한 것이다. Fig. 9는 오리가미, 키리가미, 역설계 디자인 기반 공압형 어그제틱 구조체를 요약한 것이다.

Three Different Approach of morphing (Eguchi et al, 2022).
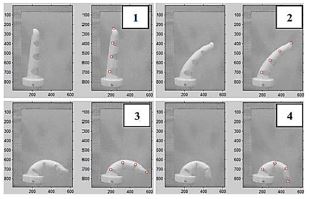
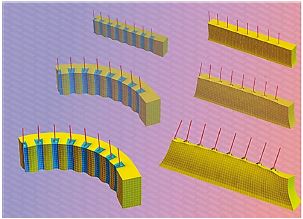
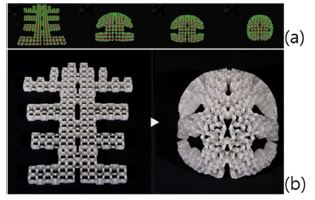
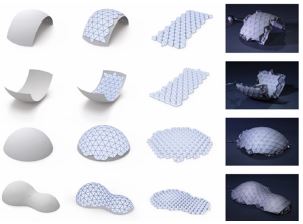
Fig. 10은 기하학적 구조체를 기반으로 하여 골격체(skeleton)를 결정하기 위한 기초디자인 자료이다. 이 구조체를 기본으로 하여 멤브레인에 넣고 수축거동을 확인하였다. 일부 패턴은 무작위로 변형되고 일부 패턴은 규칙적으로 변한다. 3D 프린팅 출력물이 부드러울 경우, 작동되지 않는 상태에서도 구형의 유연성을 갖고 있을 뿐만 아니라, 다양한 작동 상태로 부드럽게 전이될 수 있다. Fig. 11은 시뮬레이터된 패턴의 단순한 출력물을 나타낸 것이다. 골격체의 움직임을 원활하게 하기 위하여 두께에 따라 굽힘각도를 제어할 수 있는 알고리즘 설계가 필요하다.

Samples of the very early skeleton variation(Eguchi et al., 2022).

The extruded kirigami simulated model with no thickness does not deform as expected(Eguchi et al., 2022).
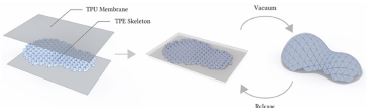
Table 6는 공압형 어그제틱 모델링, 3D 프린팅 출력물, 공압형 어그제틱 샘플 등을 정리한 것이다.
A work of morphing desingn, fabrication and applied(Eguchi et al., 2022)
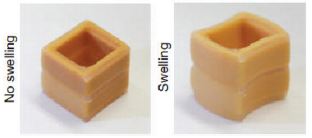
먼저 Table 6(a)는 TPE 소재로 만들어진 3D 프린팅 스켈레톤이다. 이 때 0.15 mm의 TPU 멤브레인으로 밀봉한 후, 공기를 제거함으로써 3D 프린팅 스켈레톤을 변형할 수 있다. 이 과정은 가역적이다. Table 6(b)는 TPU 멤브레인으로 코팅된 3D 프린팅 스켈레톤 샘플이다. TPU 멤브레인을 출력물의 크기에 맞게 잘라서, 웰딩기로 봉하였다. 500mm 크기의 샘플은, −5 kPa의 압력으로 공기를 제거하면, 멤브레인은 점점 뭉툭한 형상으로 변형하고, − 42 kPa의 압력하에서는 목표로하는 3차원의 형상으로 완성된다. Table 6(c)는 최적화 알고리즘으로 설계한 모델링과 출력물을 나타낸 것이다.
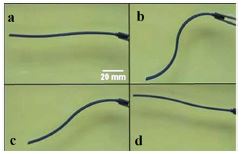
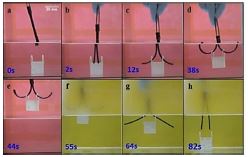
Fig. 12는 공압형 어그제틱 구조체를 적용한 무릎보호대 제조과정을 보여주는 것이다. 환자의 무릎을 3D 스캔하여 무릎 보호용 지지대를 만든다. 이 지지대는 공기 제거를 통해 서포트가 무릎의 모양으로 변형되도록 설계되며, 표면과 강연성을 제공한다. 이 때 공압력을 조절하면 부드럽게 변형이 가능하므로 재활에 효과적으로 사용할 수 있다.

Pneumatic Auxetics provides support when deflated and can be adapted to the scanned surface of the patient’s knee(Eguchi et al., 2022).
5. 요 약
본 원고는 소프트 로봇용 4D 프린팅 소재와 어그제틱 구조체에 대한 연구 동향을 정리한 것이다. 먼저 4D 프린팅 소재의 형상 변화 거동을 형상 변화와 형상기억 소재, 이중, 삼중, 다중 형상기억 효과, 접힘과 굽힘, 표면지형별로 구분하여 알아보았다. 형상 변화와 형상기억 소재 등 열이나 수분의 자극에 가역적/비가역적 혹은 규칙적/불규칙적 형상 변형이 가능할 수 있다. 다음으로, 차원별 형상이동 유형에 따른 특성과 물성에 대해 알아본 바, 1차원에서 다차원으로의 형상이동을 1D-1D 팽창/수축, 1D-2D 접힘/굽힘, 1D-3D 접힘 (1D-to-3D folding)으로 구분할 수 있다. 2차원에서 형상이동은 2D-2D 굽힙, 2D-3D 굽힘/접힘/꼬임/표면말림/표면지형변화/굽힘과 꼬임, 3차원에서 다차원으로의 형상이동은 3D-3D 굽힙과 3D-3D 선형/비선형 거동으로 구분할 수 있다. 마지막으로 4D 프린팅 메타구조체 중 힌지 구조체를 적용한 KinetiX는 단일단위 터셀레이션과 다중단위 터셀레이션으로 모델링할 수 있고, 평면 및 공간 변환이 용이하고, 컨포머블 헬멧에 적용할 수 있다. 키리가미 구조체를 기본으로 한 공압형 어그제틱 구조체는 역설계 기반 구조체로써 굽힘각도를 제어하는 알고리즘으로 설계할 수 있다. 설계 후 3D 프린팅하여 TPU 멤브레인으로 프로토 타입을 제조하였고, 압력을 낮추면서 원하는 3차원 형상으로 완성될 수 있음을 확인하였다. 온도나 습도 등의 외부자극요소에 따라 형상이나 물성을 변화할 수 있는 재료를 사용하여 변형가능한 3차원 구조체로 성형한 4D 프린팅 소재를 이용하여 상지, 하지, 손, 발 등 소프트 로봇의 외골격(exoskeleton) 소재에 적용할 수 있을 것이다. 즉 자세제어, 상황인식, 동작신호 생성 등 다양한 환경에 대응하여 착용자의 움직임에 고하중, 고기동성, 운동지속성을 지원하는 기능을 갖는 소프트 로봇용 4D 프린팅 소재는 헬스케어 웨어러블 의류 제품화 개발로의 용도 전개가 가능할 것이다. 특히 4D 프린팅 소프트 소재 및 공정개발 분야는 일상 생할 보조용이나 재활치료용 의류를 개발하기 위한 3D 프린팅 소재 및 공정의 원천 기술에 해당하므로 이와 관련한 연구의 기초 자료로서 활용되기를 기대한다.
Acknowledgments
연구는 정부(과학기술정보통신부)의 재원으로 한국연구재단의 지원을 받아 수행된 연구임(NRF-2021R1A4A1022059).
References
-
Bakarich, S. E., Gorkin III, R., Panhuis, M. I. H., & Spinks, G. M. (2015). 4D printing with mechanically robust, thermally actuating hydrogels. Macromolecular Rapid Communications, 36(12), 1211-1217.
[https://doi.org/10.1002/marc.201500079]

-
Bertoldi, K., Vitelli, V., Christensen, J., & Van Hecke, M. (2017). Flexible mechanical metamaterials. Nature Reviews Materials, 2(11), 1-11.
[https://doi.org/10.1038/natrevmats.2017.66]
-
Chen, C. P., & Lakes, R. S. (1996). Micromechanical analysis of dynamic behavior of conventional and negative Poisson’s ratio foams. 118(3), 285-288
[https://doi.org/10.1115/1.2806807]
-
Choi, J. B., & Lakes, R. S. (1992). Non-linear properties of metallic cellular materials with a negative Poisson's ratio. Journal of Materials Science, 27(19), 5375-5381.
[https://doi.org/10.1007/BF02403846]
-
Choi, J. B., & Lakes, R. S. (1996). Fracture toughness of re-entrant foam materials with a negative Poisson's ratio - Experiment and analysis. International Journal of Fracture, 80(1), 73-83.
[https://doi.org/10.1007/BF00036481]
-
Dorsey, K. L., Roberts, S. F., Forman, J., & Ishii, H. (2022). Analysis of DefeXtiles - A 3D printed textile towards garments and accessories. Journal of Micromechanics and Microengineering, 32(3), 034005.
[https://doi.org/10.1088/1361-6439/ac4fad]
-
Eguchi, S., Okabe, C., Ohira, M., & Tanaka, H. (2022, April). Pneumatic Auxetics - Inverse design and 3D printing of auxetic pattern for pneumatic morphing. In CHI Conference on Human Factors in Computing Systems Extended Abstracts, pp. 1-7.
[https://doi.org/10.1145/3491101.3519801]
-
Ge, Q., Qi, H. J., & Dunn, M. L. (2013). Active materials by four-dimension printing. Applied Physics Letters, 103(13), 131901.
[https://doi.org/10.1063/1.4819837]
-
Ge, Q., Dunn, C. K., Qi, H. J., & Dunn, M. L. (2014). Active origami by 4D printing. Smart Materials and Structures, 23(9), 094007.
[https://doi.org/10.1088/0964-1726/23/9/094007]
-
Hager, M. D., Bode, S., Weber, C., & Schubert, U. S. (2015). Shape memory polymers - Past, present and future developments. Progress in Polymer Science, 49, 3-33.
[https://doi.org/10.1016/j.progpolymsci.2015.04.002]
-
Hao, Y., Zhang, S., Fang, B., Sun, F., Liu, H., & Li, H. (2022). A review of smart materials for the boost of soft actuators, soft sensors, and robotics applications. Chinese Journal of Mechanical Engineering, 35(1), 1-16.
[https://doi.org/10.1186/s10033-022-00707-2]
-
Jamal, M., Kadam, S. S., Xiao, R., Jivan, F., Onn, T. M., Fernandes, R., ... & Gracias, D. H. (2013). Bio?origami hydrogel scaffolds composed of photocrosslinked PEG bilayers. Advanced Healthcare Materials, 2(8), 1142-1150.
[https://doi.org/10.1002/adhm.201200458]
-
Kim, H. S., Koo, D. S., Nam, Y. J., Cho, K. J., & Kim, S. (2019). Research on technology status and development direction of wearable robot. Fashion & Textile Research Journal, 21(5), 640-655.
[https://doi.org/10.5805/SFTI.2019.21.5.640]
-
Kim, H., Ahn, S. K., Mackie, D. M., Kwon, J., Kim, S. H., Choi, C., ... & Ko, S. H. (2020). Shape morphing smart 3D actuator materials for micro soft robot. Materials Today, 41, 243-269.
[https://doi.org/10.1016/j.mattod.2020.06.005]
-
Kokkinis, D., Schaffner, M., & Studart, A. R. (2015). Multimaterial magnetically assisted 3D printing of composite materials. Nature communications, 6(1), 1-10.
[https://doi.org/10.1038/ncomms9643]
-
Kolken, H. M., & Zadpoor, A. A. (2017). Auxetic mechanical metamaterials. RSC advances, 7(9), 5111-5129.
[https://doi.org/10.1039/C6RA27333E]
-
Kuang, X., Roach, D. J., Wu, J., Hamel, C. M., Ding, Z., Wang, T., ... & Qi, H. J. (2019). Advances in 4D printing - Materials and applications. Advanced Functional Materials, 29(2), 1805290.
[https://doi.org/10.1002/adfm.201805290]
-
Kuksenok, O., & Balazs, A. C. (2016). Stimuli-responsive behavior of composites integrating thermo-responsive gels with photo-responsive fibers. Materials Horizons, 3(1), 53-62.
[https://doi.org/10.1039/C5MH00212E]
-
Lakes, R. S., & Elms, K. (1993). Indentability of conventional and negative Poisson's ratio foams. Journal of Composite Materials, 27(12), 1193-1202.
[https://doi.org/10.1177/002199839302701203]
-
Lauff, C. Simpson, T.W. Frecker, M. Ounaies, Z. Ahmed, S. von Lockette, P. Strzelec, R. Sheridan, R., & Lien, J. M. (2014). Differentiating bending from folding in origami engineering using active materials. ASME 2014 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, American Society of Mechanical Engineers, pp. V05BT08A040-V005BT008A040.
[https://doi.org/10.1115/DETC2014-34702]
- Lee, S. (2022). A review of 3D printing soft materials - 2022 additive manufacturing of soft materials conference. Fiber Technology & Industry, 26(3), 112-122.
-
Li, H., Gao, X., & Luo, Y. (2016). Multi-shape memory polymers achieved by the spatio-assembly of 3D printable thermoplastic building blocks, Soft Matter 12, 3226–3233.
[https://doi.org/10.1039/C6SM00185H]
-
Liu, Y., Genzer, J., & Dickey, M. D. (2016). “2D or not 2D” - Shape-programming polymer sheets. Progress in Polymer Science, 52, 79-106.
[https://doi.org/10.1016/j.progpolymsci.2015.09.001]
-
Mao, Y., Yu, K., Isakov, M. S., Wu, J., Dunn, M. L., & Jerry Qi, H. (2015). Sequential self-folding structures by 3D printed digital shape memory polymers. Scientific Reports, 5(1), 1-12.
[https://doi.org/10.1038/srep13616]
-
Momeni, F., Liu, X., & Ni, J. (2017). A review of 4D printing. Materials & Design, 122, 42-79.
[https://doi.org/10.1016/j.matdes.2017.02.068]
-
Mutlu, R., Alici, G., in het Panhuis, M., Spinks, G. (2015). Effect of flexure hinge type on a 3D printed fully compliant prosthetic finger, 2015 IEEE International Conference on Advanced Intelligent Mechatronics (AIM)IEEE, pp. 790-795.
[https://doi.org/10.1109/AIM.2015.7222634]
-
Ou, J., Ma, Z., Peters, J., Dai, S., Vlavianos, N., & Ishii, H. (2018). KinetiX-designing auxetic-inspired deformable material structures. Computers & Graphics, 75, 72-81.
[https://doi.org/10.1016/j.cag.2018.06.003]
-
Papadopoulou, A., Laucks, J., & Tibbits, S. (2017). Auxetic materials in design and architecture. Nature Reviews Materials, 2(12), 1-3.
[https://doi.org/10.1038/natrevmats.2017.78]
-
Peraza-Hernandez, E. A., Hartl, D. J., Malak Jr, R. J., & Lago udas, D. C. (2014). Origami-inspired active structures - A synthesis and review. Smart Materials and Structures, 23(9), 094001.
[https://doi.org/10.1088/0964-1726/23/9/094001]
-
Pinskier, J., & Howard, D. (2022). From bioinspiration to computer generation - Developments in autonomous soft robot design. Advanced Intelligent Systems, 4(1), 2100086.
[https://doi.org/10.1002/aisy.202100086]
-
Raviv, D., Zhao, W., McKnelly, C., Papadopoulou, A., Kadambi, A., Shi, B., ... & Tibbits, S. (2014). Active printed materials for complex self-evolving deformations. Scientific Reports, 4(1), 1-8.
[https://doi.org/10.1038/srep07422]
-
Ren, X., Das, R., Tran, P., Ngo, T. D., & Xie, Y. M. (2018). Auxetic metamaterials and structures - A review. Smart materials and structures, 27(2), 023001.
[https://doi.org/10.1088/1361-665X/aaa61c]
-
Ryan, K. R., Down, M. P., & Banks, C. E. (2021). Future of additive manufacturing - Overview of 4D and 3D printed smart and advanced materials and their applications. Chemical Engineering Journal, 403, 126162.
[https://doi.org/10.1016/j.cej.2020.126162]
-
Ryu, J., D’Amato, M., Cui, X., Long, K. N., Jerry Qi, H., & Dunn, M. L. (2012). Photo-origami—Bending and folding polymers with light. Applied Physics Letters, 100(16), 161908.
[https://doi.org/10.1063/1.3700719]
-
Sun, L., & Huang, W. M. (2010). Mechanisms of the multi-shape memory effect and temperature memory effect in shape memory polymers. Soft Matter 6, 4403-4406.
[https://doi.org/10.1039/c0sm00236d]
-
Sydney Gladman, A., Matsumoto, E. A., Nuzzo, R. G., Mahadevan, L., & Lewis, J. A. (2016). Biomimetic 4D printing. Nature Materials, 15(4), 413-418.
[https://doi.org/10.1038/nmat4544]
-
Thérien-Aubin, H., Wu, Z. L., Nie, Z., & Kumacheva, E. (2013). Multiple shape transformations of composite hydrogel sheets. Journal of the American Chemical Society, 135(12), 4834-4839.
[https://doi.org/10.1021/ja400518c]
-
Tibbits, S. (2014). 4D printing - Multi-material shape change. Architectural Design, 84(1), 116-121.
[https://doi.org/10.1002/ad.1710]
-
Tibbits, S., Mcknelly, C., Olguin, C., Dikovsky, D., & Hirsch, S. (2014). 4D Printing and universal transformation. Proceedings of the 34th Annual Conference of the Association for Computer Aided Design in Architecture (ACADIA).
[https://doi.org/10.52842/conf.acadia.2014.539]
-
Villar, G., Graham, A.D., & Bayley, H. (2013). A tissue-like printed material. Science, 340, 48-52.
[https://doi.org/10.1126/science.1229495]
-
Wagner, M., Chen, T., & Shea, K. (2017). Large shape transforming 4D auxetic structures. 3D printing and Additive Manufacturing, 4(3), 133-142.
[https://doi.org/10.1089/3dp.2017.0027]
-
Wang, J., & Chortos, A. (2022). Control strategies for soft robot systems. Advanced Intelligent Systems, 4(5), 2100165.
[https://doi.org/10.1002/aisy.202100165]
-
Wang, P., Casadei, F., Shan, S., Weaver, J. C., & Bertoldi, K. (2014). Harnessing buckling to design tunable locally resonant acoustic metamaterials. Physical Review Letters, 113(1), 014301.
[https://doi.org/10.1103/PhysRevLett.113.014301]
-
Wang, Q., & Zhao, X. (2014). Phase diagrams of instabilities in compressed film-substrate systems. Journal of Applied Mechanics, 81(5). 051004.
[https://doi.org/10.1115/1.4025828]
-
Wu, J., Yuan, C., Ding, Z., Isakov, M., Mao, Y., Wang, T., ... & Qi, H. J. (2016). Multi-shape active composites by 3D printing of digital shape memory polymers. Scientific Reports, 6(1), 1-11.
[https://doi.org/10.1038/srep24224]
-
Xie, T. (2010). Tunable polymer multi-shape memory effect. Nature, 464, 267-270.
[https://doi.org/10.1038/nature08863]
-
Xing, L., Wang, M., Zhang, J., Chen, X., & Ye, X. (2020). A survey on flexible exoskeleton robot. 2020 IEEE 4th Information Technology, Networking, Electronic and Automation Control Conference (ITNEC), pp. 170-174.
[https://doi.org/10.1109/ITNEC48623.2020.9084920]
-
Yu, K., Dunn, M. L., & Qi, H. J. (2015). Digital manufacture of shape changing components. Extreme Mechanics Letters, 4, 9-17.
[https://doi.org/10.1016/j.eml.2015.07.005]
-
Yu, K., Xie, T., Leng, J., Ding, Y., Qi, & H. J. (2012). Mechanisms of multi-shape memory effects and associated energy release in shape memory polymers. Soft Matter 8, 5687-5695.
[https://doi.org/10.1039/c2sm25292a]
-
Zhang, Q., Zhang, K., & Hu, G. (2016). Smart three-dimensional lightweight structure triggered from a thin composite sheet via 3D printing technique. Scientific Reports, 6(1), 1-8.
[https://doi.org/10.1038/srep22431]
-
Zhou, J., & Sheiko, S. S. (2016). Reversible shape-shifting in polymeric materials. Journal of Polymer Science Part B - Polymer Physics, 54(14), 1365-1380.
[https://doi.org/10.1002/polb.24014]
-
Zhou, Y., Huang, W. M., Kang, S. F., Wu, X. L., Lu, H. B., Fu, J., & Cui, H. (2015). From 3D to 4D printing - Approaches and typical applications. Journal of Mechanical Science and Technology, 29(10), 4281-4288.
[https://doi.org/10.1007/s12206-015-0925-0]