3D 프린팅 손가락 모형의 동작 제어에 관한 연구

©2022 Fashion and Textile Research Journal (FTRJ). This is an open access journal. Articles are distributed under the terms of the Creative 52 Commons Attribution Non-Commercial License (http://creativecommons.org/licenses/by-nc/4.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
Abstract
This study developed and evaluated the motion control of 3D printed fingers applied to smart gloves. Four motions were programmed by assembling the module using the Arduino program: cylindrical grasping, spherical grasping, tip-to-tip pinch gripping, and three-jaw pinch gripping. Cap and re-entrant (RE) strip types were designed to model the finger. Two types of modeling were printed using filaments of thermoplastic elastomer (TPE) and thermoplastic polyurethane (TPU). The prepared samples were evaluated using three types of pens for cylidrical grasping, three types of balls for spherical grasping, and two types of cards for tip-to-tip pinch gripping and three-jaw pinch gripping. The motion control of fingers was connected using five servo motors to the number of each control board. Cylindrical and spherical grasping were moved by controlling the fingers at 180° and 150°, respectively. Pinch gripping was controlled using a tip-to-tip pinch motion controlled by the thumb at 30° and index-middle at 0° besides a three-jaw pinch motion controlled by the thumb-index finger-middle at 30°, 0°, and 0°, respectively. As a result of the functional evaluation, the TPE of 3D-printed fingers was more flexible than those of TPU. RE strip type of 3D-printed fingers was more suitable for the motion control of fingers than the 3D-printed finger.
Keywords:
3D printing finger prototypes, motion control, thermoplastic elastomer, thermoplastic polyurethane, evaluation of grasping키워드:
3D 프린팅 손가락 모형, 동작 제어, 열가소성 엘라스토머, 열가소성 폴리우레탄, 잡기 평가1. 서 론
패션산업 내 스마트 의류는 ICT와 첨단 섬유소재·기술이 융합된 고기능성 의류로 인체의 생체신호감지, 발열·온도 조절, 데이터 전송, 스마트폰 제어 등 다양한 기능을 수행하고 있다(Bae, 2018; “E-textiles 2020-2030”, 2017; Park, 2019; “Smart Clothing Market”, 2019; “Wearable Technology Forecasts”, 2019). 최근 의류학 분야에서는 스마트 의류에서 나아가 웨어러블 로봇(wearable robot)에 대한 연구개발이 다양한 주제로 진행되고 있다(Eom & Lee, 2020a; Eom & Lee, 2020b; Kim et al., 2019; Lee, 2020; Xing et al, 2020). 웨어러블 로봇은 몸에 착용하는 형태의 로봇 시스템이며, 착용형 로봇, 외골격 로봇(exoskeleton robot), 슈트 로봇(suit robot) 등으로 용어가 혼용되고 있다. 웨어러블 로봇은 재료에 따라 강체 소재 로봇과 유연 소재 로봇으로 나누며, 유연 소재 로봇은 엘라스토머, 직물, 겔과 같은 유연한 소재로 이루어진 로봇으로 강체 소재에 유연 소재를 결합한 경우까지 포함한다. 센서, 제어, 소프트웨어 기술이 발전하면서 크게 군용, 산업 작업용, 재난구조용, 재활 치료용, 일상생활 보조용 5개 용도로 사용되며, 착용 부위는 상지, 하지, 전신, 손·손목, 발·발목 부위에 적용이 가능하다.
이 중 스마트 장갑은 유연 소재 웨어러블 로봇 중 하나로 다양한 단말 중 손에 착용되는 형태이다. 주로 재활치료용, 일상생활 보조용, 시각 · 청각 약자를 위한 소통용 등의 제품 개발이 진행되고 있으며, 이 중 손 재활을 위한 소프트 웨어러블 로봇 재활장치에 대한 연구 및 제품 개발이 진행되고 있다(Koo & Lee, 2017; Lee & Jung, 2016; Park & Kim, 2016). 손은 신체 중 가장 작은 공간에 가장 많은 관절과 자유도(degree of freedom)가 포함되어 있는 기관이며, 일상생활의 상지를 활용한 동작에는 항상 필요로 되어 중요한 역할을 맡는다. 손은 상지의 가장 말단에 위치하여 뇌졸중(stroke), 척추손상(spinal cord injury), 뇌성마비(cerebral palsy)등의 질환 후 가장 후유증이 심하게 나타나며 재활 치료가 가장 어려운 부위 중 하나이다. 손 재활은 대부분 어깨, 팔꿈치, 손목 등의 재활운동과 손 재활치료가 따로 이루어진다. 손 재활을 위한 유연 소재 웨어러블 제품은 부피와 무게를 감소시키기 위해 네오프렌, 벨크로 파스너 등의 유연한 소재가 주로 사용되며, 손가락의 힘을 보조해주는 DC 모터, push-pull 구동기 장치가 부착된다. 주요 제품으로는 한국 서울대학교의 Exo-glove(Kang et al., 2018), 중국의 Syerbo의 Syrebo(“Syrebo”, 2018), 미국 Medstar 국립재활병원에서 개발한 Lee의 BiomHED(Lee et al., 2014), 미국의 Neofect의 Rafael(“Rafael”, 2014), 스웨덴 Bioservo사의 SEM-Glove(“SEM-Glove”, 2011), Chicago 재활병원에서 개발한 재활장치(Ochoa et al., 2009), 미국의 CyberGlove의 Cyber-Glove II(“CyberGlove II”, 2009), 독일의 Gloreha사의 Gloreha(“Gloreha”, 2008) 등이 있다. Mohammadi et al.(2018)의 연구에서는 일상생활 및 손 재활을 위한 3D 프린팅 개인 맞춤형 외골격 장갑 Flexo-glove을 개발하였다. 엄지는 고정식으로 강체 소재이며 나머지 손가락은 경도 Shore 90A의 열가소성 폴리우레탄(Thermoplastic polyurethane, TPU) 소재를 사용하여 소프트한 외골격을 3D 프린팅하여 제조하고, 엄지 외 다른 손가락에 동작을 부여할 수 있도록 케이블 및 액츄에이터를 부착하여 움직임이 가능하도록 하였다. 제조된 장갑의 집기력(pinch force)은 22 N이며 파지력(grasp force)는 48 N의 강도를 가지는 것으로 측정되었고, 실린더형(cylindrical), 구형(spherical) 및 집기(pinch) 세 동작으로 성능평가를 하여 사용가능성을 확인하였다.
본 연구팀의 선행 연구로는 유연 소재 중 하나인 TPU를 다양한 경도별로 3D 프린팅에 적용한 연구를 진행하였다. Kim and Lee(2020)는 경도 Shore 85A, 87A, 95A, 75D 4종의 TPU 필라멘트의 물성을 확인하였고, auxetic reentrant(RE) 구조체 출력물로 출력하였을 때 85A 및 87A의 TPU 필라멘트가 인장 시 강인도가 가장 우수한 것으로 확인되었다. Jung et al.(2022)에서는 TPU 칩으로 제조한 경도 Shore 65A, 75A, 80A, 85A 4종의 TPU 필라멘트와 자체 합성한 경도 Shore 75A 및 85A 2종의 TPU 필라멘트를 3D 프린팅 압출 후 모폴로지를 통해, 경도가 작고 소프트한 Shore 75A가 3D 프린팅 RE 구조체 제조에 적합한 것으로 나타났다. Kabir et al.(2020)의 연구에서는 TPU와 SMTPU(Shape Memory Thermoplastic Polyurethane) 필라멘트로 출력한 auxetic sinusoidal 구조체의 형상기억 주기에 따른 물리적 특성을 분석하고, 3단계 형상기억 주기를 통해 3D 프린팅 기능성 메타구조체 적용 제품 개발이 가능함을 확인하였다. 그러나 손가락 동작 제어가 가능한 스마트 장갑에 3D 프린팅 기술을 적용하기 위해서는 경량성과 기동성을 부여하기 위해 더욱 가볍고 소프트한 유연 소재를 사용함이 필요로 됨에 따라, 본 연구에서는 경도 Shore 87A의 TPU와 경도 Shore 83A의 열가소성 엘라스토머(Thermoplastic elastomer, TPE)를 2종의 소재를 적용하여 비교하고자 한다.
이에 본 연구에서는 스마트 장갑에 적용을 위하여, 다양한 경도별 유연소재를 이용하여 3D 프린팅 손가락 모형을 제작하고, 손가락 동작 제어에 관한 연구를 진행하고자 한다. 첫째, 손가락 동작 제어 시스템을 개발하기 위해, 손가락 시제품과 모듈 재료로 시스템을 제조하고 프로그래을 작성하여 원통형 잡기(cylindrical grasping), 구형 잡기(spherical grasping), 두 손가락 집기(tip-to-tip pinch gripping), 세 손가락 집기(three-jaw pinch gripping)의 총 네 가지 동작을 구현한다. 둘째, 3D 프린팅 손가락 모형은 캡(cap) 유형과 auxetic re-entrant(RE) 스트립(strip) 2가지 유형으로 모델링하고, TPU와 TPE 필라멘트 소재를 사용하여 3D 프린팅 손가락 모형을 출력한다. 셋째, 3D 프린팅 손가락의 잡기 성능평가를 위해 원통형 잡기, 구형 잡기, 두 손가락 집기, 세 손가락 집기의 동작기능성을 정성적으로 평가한다.
2. 실험방법
2.1. 손가락 동작 제어 시스템
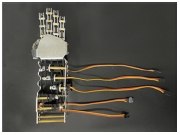
Table 1은 손가락 동작 제어 시스템 개발을 위해 사용된 손가락 재료를 나타낸 것이다. 시제품 제작에 사용된 재료는 5DOF 휴머노이드 메탈 손가락(TZT Co. Ltd., China)이다. 손가락은 엄지손가락의 세 관절 및 나머지 손가락의 네 관절이 나사로 연결되는 형태로, 총 19개의 관절과 14개의 나사로 구성된다. 이 외 부품은 손바닥과 손등, 액추에이터 역할의 케이블타이, 각 손가락을 동작시키는 5개의 서보모터를 사용하였다.

Materials for motion control fingers parts
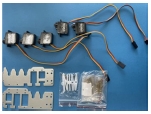
Table 2는 손가락 동작 제어 시스템 프로그래 개발을 위해 사용된 프로그래밍 재료를 나타낸 것이다. 손가락 동작 제어 시스템을 프로그래밍하여 구동시키기 위해, 컨트롤러는 컨트롤 보드 Arduino UNO USB(Arduino, USA), 브레드보드(Arduino, USA), 18 cm 점퍼 와이어, USB 2.0 케이블 및 직류전원 케이블(SM-0525K, Atron Co. Ltd., Kora)을 사용하였다.
Programming materials for motion control fingers system
Fig. 1에는 손가락 동작 제어 시스템의 회로 설계도를 나타낸 것이다. 손가락 동작 제어 시스템 모듈 재료를 사용하여 설계를 진행하였다. 검정색(GND)은 전원의 (−)를, 적색은 전원(power)의 (+) 및 황색은 신호(signal)를 보내주는 것을 의미한다. 회로 연결은 일반적으로 4.5 V ~ 5 V 외부전원의 (+) 및 (−)에 연결하고, 외부 전원의 (−)를 아두이노 및 서브모터의 GND에 연결하도록 구성하였다. 손가락 동작 제어 프로그래밍은 아두이노 1.8.19 버전을 사용하여 작성하였다.

Scheme of Arduino UNO and servo motor for motion control of fingers.
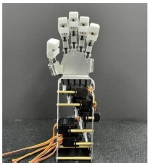
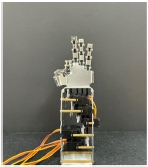
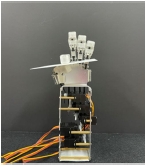
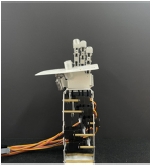
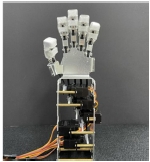
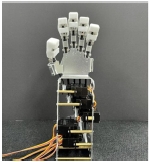
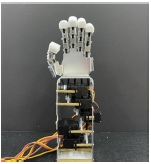
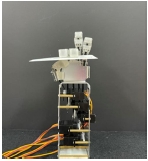
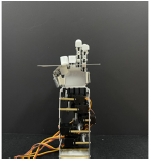
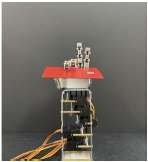
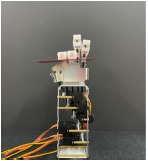
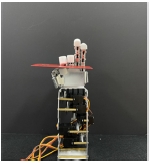
Fig. 2는 완성된 손가락 동작 제어 시스템을 나타낸 것이다. 설계도를 바탕으로 전원공급을 위해 전원 케이블과 브레드보드의 (+)부분 및 (−)부분을 연결하고, 동일하게 UNO 보드와 서보모터에도 전원을 공급해주기 위해서 연결하였다. UNO보드는 GND 부분을 브레드보드의 (−)부분과 연결하였으며, 서보모터는 연결된 검정색 및 적색 선을 브레드보드의 (−)부분 및 (+)부분과 연결하였다. 다음은 프로그래밍 디지털 신호 입출력을 위해서, UNO 보드의 Digital 부분과 서보모터에 연결된 황색선을 연결하였다. 손가락별 서보모터 1-5번은 각각 UNO 보드의 엄지(thumb)는 Pin 3, 검지(index finger)는 Pin 5, 중지(middle finger)는 Pin 6, 약지(ring finger)는 Pin 9, 소지(little finger)는 Pin 10번에 연결하였다.

Description of motion control of fingers.
이후 코딩은 서보모터를 0o ~ 180o 구동 범위에서 펄스 폭 변조(Pulse width modulation, PWM) 제어로 가능하도록 설계되었다. PWM 제어는 5 V 상태에서 빠르게 on-off를 반복하는 것을 의미하며, 로봇 관절과 같은 부위에 서보모터의 회전각 제어가 필요한 곳에 많이 이용된다. 이에 서보모터의 제어는 아두이노를 사용하여 손가락 동작 제어를 구현하였다. 손가락이 모두 펴진 상태의 초기 상태는 다섯 손가락의 서보모터의 각도가 90°이며, 다섯 손가락이 모두 굽혀져 주먹을 쥔 상태는 엄지, 검지, 중지의 서보모터 1, 2, 3번은 0o 및 약지, 소지의 서보모터 4와 5번은 180°로 값을 입력하였다. 서보모터가 다른 각도로 제어되는 이유는 구조상 약지과 소지가 반대로 조립되어있기 때문이다. 손가락 동작은 물체를 잡거나 집는 자세를 통한 손의 운동기능 평가를 진행한 선행연구를 바탕으로 네 개 동작을 선정하였다. 잡기(grasp)는 손가락 또는 손과 손바닥으로 잡는 동작이며 집기(pinch)는 엄지와 다른 손가락을 사용하여 물체를 집는 동작이다(Lee, 2019; NG et al., 2014). 또한 물체에 따라 손의 잡기 자세가 달라진다고 보고되었다(Lee & Jung, 2015). 따라서, 본 연구에서는 세 가지 유형의 물체에 따른 잡기 동작 2가지와 집기 동작 2가지를 선택하였다. 4개 동작으로, 잡기 동작은 원통형 잡기(Cyclindrical grasping, CG), 구형 잡기(Spherical grasping, SG) 2개 및 집기 동작은 엄지와 검지의 끝으로 집는 두 손가락 집기(Tip-to-tip pinch gripping, TTPG), 엄지, 검지, 중지의 끝으로 집는 세 손가락 집기(Three-jaw pinch gripping, TJPG) 2개로 총 4가지 동작으로 프로그래밍하였다.
2.2. 3D 프린팅 손가락 제조
Table 3은 3D 프린팅 손가락 제조에 사용된 재료 및 물리적 특성을 나타낸 것이다. 3D 프린팅 필라멘트는 TPU 필라멘트(eFlex, Esun Industrial Co. Ltd., China) 및 TPE 필라멘트(eLastic, Esun Industrial Co. Ltd., China) 2종을 사용하였다. TPU는 직경 1.75 mm 및 경도는 Shore 87A이다. TPE 필라멘트의 직경은 1.75 mm이며 경도는 Shore 83A이다. 인장강신도 특성으로 확인한 바, TPU의 초기탄성률은 2.4 MPa, 최대 강도에서의 변위는 1163.0%, 최대 강도는 39.2 MPa, 강인도는 14.7 J로 확인하였다. TPE의 초기탄성률은 2.3 MPa, 최대 강도에서의 변위는 1113.8 %, 최대 강도는 27.9 MPa, 강인도는 11.2 J로 측정되어, TPE가 TPU보다 더 소프트하며 유연한 것으로 나타났다. 또한 3D 프린터는 0.4 mm 직경의 노즐을 가진 용융 적층 방식(Fused deposition modeling, FDM)의 3D 프린터(Cubicon single plus, Cubicon, Korea)를 사용하였다.
Specification of TPU filament and TPE filament
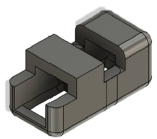
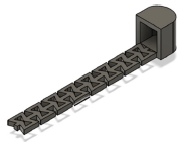
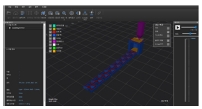
Table 4는 3D 프린팅 손가락의 모델링 조건을 나타낸 것이다. 이는 모델링 프로그램 Fusion 360(Autodesk, USA)을 사용하여 캡(Cap) 유형 및 Re-entrant 스트립(REstrip) 유형 두 가지로 모델링하였다. 캡 유형은 손가락의 1-2번째 마디에 골무형태로 씌울 수 있는 형태이며 굽힘 성능을 부여하기 위해 손가락의 등부분에 구멍을 주었다. 사이즈는 가로 × 세로 × 높이가 12.5 × 25.0 × 11.5 mm3이다. RE 스트립 유형은 예비 성능평가를 통해 손가락의 세 마디 역할이 가능하도록, 손가락 1번째 끝마디에 골무형태로 씌워 고정하고 손가락의 등부분에는 RE 구조를 적용하였다. 엄지의 사이즈는 가로 × 세로 × 높이가 11.2 × 54.1 × 11.9 mm3 및 나머지 11.2 × 69.2 × 11.9 mm3이다. 모델링한 파일은 .stl 형식으로 저장하였다.
Modelling of 3D printed finger
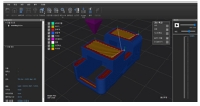
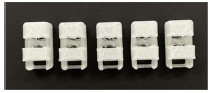
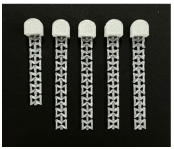
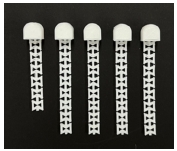
Table 5는 3D 프린팅 손가락의 출력물의 이미지를 나타낸 것이다. 모델링 파일은 슬라이싱 프로그램 Cubicreator 버전 4.4(Cubicon, Korea)에서 출력조건을 설정 후 .g-code 형식으로 변환하였다. 출력 조건은 다음과 같다. 노즐 온도는 TPU 및 TPE 각각 230oC 및 210oC, 베드 온도는 실온, 출력 속도는 60 mm/sec, 채우기 밀도는 50%, 및 채우기 패턴은 Triangles로 설정하였다. 실제 출력 시간은 캡 유형은 및 RE 스트립 유형은 각각 18분 35초 및 18분 1초로 확인하였다. 출력물 실제 사이즈 가로 × 세로 × 높이는 Cap-TPU와 Cap-TPE는 24 × 12 × 11 mm3, REstrip-TPU와 REstrip-TPE는 54 × 11 × 12 mm3로 확인하였다. 출력물 무게는 Cap-TPU는 1.4 g, Cap-TPE는 1.3 g, REstrip-TPU는 1.1 g, REstrip-TPE는 1.0 g으로 측정되었다.
Sample images of 3D printed finger
2.3. 특성분석
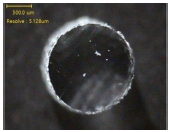
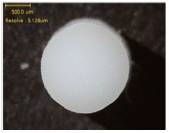
Table 6은 3D 프린팅 손가락 동작 제어 시스템 성능평가에 사용한 재료를 나타낸 것이다. 손가락 동작 제어 시스템 성능 평가는 CG, SG, TTPG, TJPG 네 개 동작으로 진행하였다. CG에 사용된 물체는 펜 유형으로, 직경과 무게별로 3종을 선택하였다. Pen 1의 소재는 PP(Polypropylene)이며, 사이즈 길이 × 직경은 14.5 × 10.0 mm, 무게는 7.5 g이다. Pen 2의 소재는 PP, 사이즈는 14.5 × 15 mm 및 무게 14.5 g이다. Pen 3의 소재는 PP이며, 사이즈는 12.0 × 17 mm, 무게는 16.6 g이다. SG는 지름과 무게별로 3종의 공 유형을 선택하였다. Ball 1의 소재는 ABS(Acrylonitrile Butadiene Styrene)이며, 지름 25 mm, 무게 7.8 g이다. Ball 2의 소재는 PU(Polyurethane), 지름은 40 mm, 무게는 40.1 g이다. Ball 3의 소재는 ABS, 지름 40 mm 및 무게 40.1 g이다. TTPG 및 TJPG는 카드 유형을 소재별로 2종을 선택하였다. Card 1은 종이소재로 가로 × 세로 × 두께가 90.0 × 50 × 0.3 mm3 및 무게 1.0 g이며 Card 2는 PP소재, 사이즈는 85.0 × 54.0 × 0.8 mm3 및 무게는 4.9 g으로 확인되었다. 각 성능평가는 네 가지 동작을 프로그래밍 후 각 동작별 물체를 집는 상태를 사진을 찍어 제시하였다. 또한, 손가락 시제품, 캡 유형과 RE 스트립 유형을 적용한 세 가지 상태로 진행하였다.
Performance evaluation of motion control of fingers
3. 결과 및 고찰
3.1. 손가락 동작 제어 시스템 제작
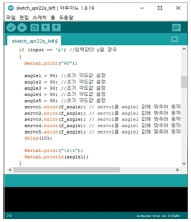
Fig. 3은 손가락 동작 제어 시스템의 기본 플랫폼을 나타낸 것이다. Fig. 2의 연결된 손가락 동작 제어 시스템을 중심으로 기본 소스코드를 구성하였다. 시스템 플랫폼은 아두이노 호환 보드로 개발하였다. #include를 선언하고, Servo servo; 를 통해 서보모터 제어가 가능하다. 이후 int 함수를 통해 motor1 ~ motor5를 각 입출력 핀(pin) 3, 5, 6, 9, 및 10번으로 설정하고, 초기 각도를 전원을 연결하게 되면 서보모터 5개가 90°에 맞춰 움직이도록 설정하였다. Servo.attach(motor1)는 각 서보모터에 입출력 핀번호를 지정하였다. 또한 명령어로 손가락 동작을 제어가능하도록 Serial.println 함수를 사용하여 시리얼 명령 ‘P’를 입력할 경우 서보모터가 90°로 움직여 손을 편 초기 상태가 되며, ‘R’을 입력할 경우 서보모터 1~3번이 0o 및 4~5번이 180°로 움직여 잡기 동작이 되도록 하였다. TTPG와 TJPG 동작의 경우 시리얼 명령 ‘V’가 입력되면 서보모터 1과 2가 30o 및 0o로 회전되며, 시리얼 명령 ‘W’를 입력 서보모터 1, 2, 3이 각각 30o, 0o, 0o로 회전되어 동작이 가능하도록 하였다.

Coding of motion control of fingers.
3.2. 손가락 잡기 동작 제어 프로그래밍
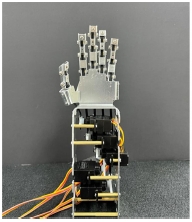
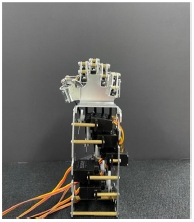
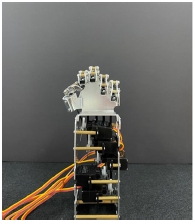
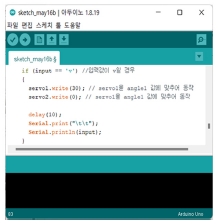
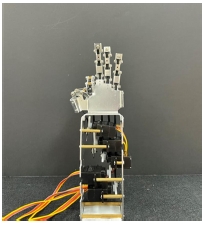
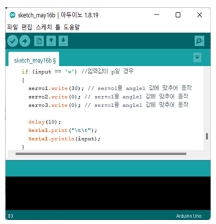
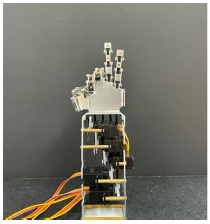
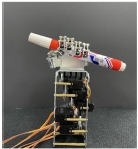
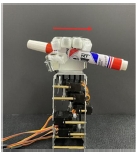
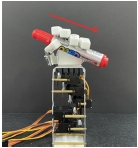
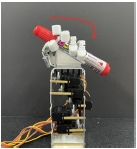
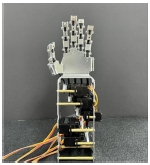
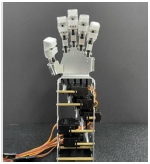
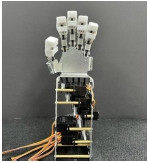
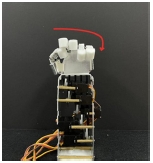
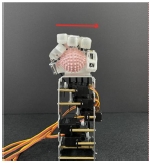
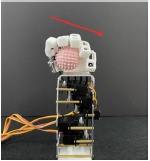
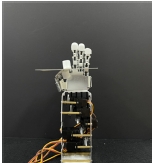
Table 7은 원통형 잡기, 구형 잡기, 두 손가락 집기, 세 손가락 집기 등 손가락 동작 제어 프로그래밍 코드와 결과 이미지를 나타낸 것이다.
Programming of motion control of finger
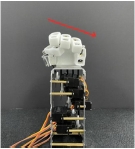
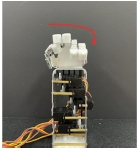
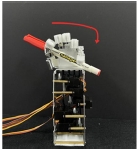
초기 상태는 전원연결 시, 서보모터 5개가 90o에 맞춰 동작하였다. CG 동작은 이후 시리얼 명령 ‘R’을 입력하면 서보모터 1~3이 0o로 회전하고 서보모터 4~5는 180o로 회전하여 잡기 동작을 하는 것으로 확인하였다. SG 동작도 마찬가지로 전원을 연결하게 되면, 서보모터 5개가 90o에 맞춰 동작하였다. 시리얼 명령 ‘R’을 입력하면 서보모터 1~3이 30o로 회전하고 서보모터 4~5는 150°로 회전하여 잡기 동작이 제어되었다. TTPG 동작은 시리얼 명령 ‘V’를 입력 시, 서보모터 1과 2가 앞으로 30o 및 0o로 회전되어 엄지와 검지가 굽혀져 동작이 제어되었다. TJPG 동작은 시리얼 명령 ‘W’를 입력하면 서보모터 1, 2, 3이 각각 30o, 0o, 0o로 회전하여 엄지, 검지, 중지가 굽혀져 집는 세 손가락이 집기 동작으로 제어가 가능한 것을 확인하였다.
3.3. 3D 프린팅 손가락 동작 제어 시스템 성능평가
3D 프린팅 메타구조체 적용 손가락 동작 제어 시스템 동작 기능성 성능평가는 손가락 시제품, 캡 유형과 RE 스트립 2가지 유형을 적용한 세 가지 상태로 진행되었다. 또한 각 동작별 다른 물체를 사용하여 성능평가를 하였다.
CG 동작 제어 성능평가: Table 8는 원통형 잡기 동작의 성능평가 결과를 나타낸 것이다. 손가락 시제품은 펜을 자연스럽게 움켜쥐는 것으로 확인되었다. 그러나 펜 1은 두께가 얇아 잡는 것이 불가하였다. Cap-TPU는 주먹 쥔 상태에서 모델링의 두께로 인해 손가락이 180o로 굽혀지지 않고 굽혀진 손가락의 각도가 일자로 나타났다. 그러나 Cap-TPE는 동작 시 손가락의 각도가 사선으로 나타나며 little은 완전히 굽혀졌다. RE 스트립 유형은 캡 형태보다 손가락의 각도가 더 많이 굽혀졌다. REstrip-TPU는 little이 완전히 굽혀지며 REstrip-TPE는 ring과 little이 완전히 굽혀져 손가락의 각도가 사선으로 나타났다. 따라서 TPE 소재 및 RE 스트립 유형에서 손가락 동작이 자연스럽게 되는 것으로 확인되었다. 이는 TPE의 경도와 인장특성의 결과로 확인한 바, 더욱 소프트하여 손가락 동작 시 움직임이 자연스럽게 나타날 수 있는 것으로 확인된다. 펜의 유형별 동작 성능평가 결과는, 펜 1의 경우 두께가 얇아서 동작이 불가능한 것으로 나타났으며, 펜 2와 펜 3의 경우는 잡기 동작이 모두 가능하였다. 따라서, 두께 15 mm 이상의 펜 조건에서 CG 동작이 가능한 것으로 확인되었다.
Performance evaluation of motion control of finger for CG
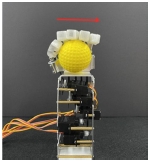
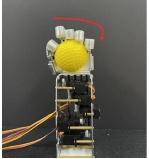
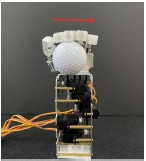
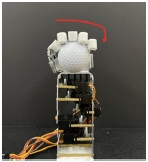
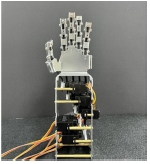
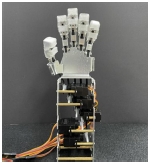
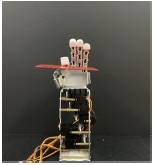
SG 동작 제어 성능평가: Table 9는 SG 동작의 성능평가 결과를 나타낸 것이다. 손가락 시제품은 잡기 동작 시 모든 공을 자연스럽게 잡아 굽혀진 손가락의 각도가 공의 형태에 따라 둥글게 나타났다. 캡 유형은 CG 동작과 동일한 경향으로, 나타났다. Cap-TPU는 굽혀진 손가락의 각도가 일자로 나타남을 확인하였고, Cap-TPE는 ring과 little이 각도에 맞춰 자연스럽게 굽혀져 사선으로 굽혀짐을 확인하였다. RE 스트립 유형은 캡유형보다 굽혀진 손가락의 각도가 사선으로 나타나 동작이 더욱 자연스러웠으며, CG 동작과 마찬가지로 REstrip-TPU는 little이 완전히 굽혀지며, REstrip-TPE는 ring과 little이 완전히 굽혀졌다. 공 유형별 잡기의 성능평과 결과는, 공 1의 경우 지름이 작고 돌기가 있으며 무게가 가장 가벼워서, 자연스럽게 잡는 동작이 가능한 것으로 나타났다. 특히 3D 프린팅 손가락을 적용 시에도, ring과 little이 공의 크기에 맞춰 자연스러운 잡기 동작이 가능하였다. 공 2의 경우 무게가 가볍고 소프트한 소재로 잡기 동작이 모두 안정적으로 나타났다. 그러나 Cap-TPU의 경우 손가락의 각도가 일자로 나타남을 확인하였다. 공 3의 경우, 무게가 무겁고 직경이 커서 잡는 동작이 불가하였다. 따라서, SG 동작도 CG 동작과 마찬가지로 TPE 소재와 RE 스트립 유형이 손가락 동작에 적합하였다.
Performance evaluation of motion control of fingers for SG
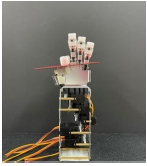
TTPG 성능평가: Table 10은 TTPG 집기 동작의 성능평가결과를 나타내었다. TTPG 동작의 경우 손가락의 thumb 손끝의 윗부분과 index 손끝이 맞닿으며 index가 thumb 위로 올라와 집는 형태로, 캡 유형과 RE 스트립 유형을 적용하여도 동작이 자연스럽게 되는 것으로 확인되었다. 카드 유형별 집기의 성능평가 결과로, card 1 및 card 2를 모두 안정적으로 집는 동작이 가능하였고, 손가락 끝의 면적이 넓은 캡 유형의 TTPG 동작이 안정적으로 나타났다.
Performance evaluation of motion control of fingers for TTPG
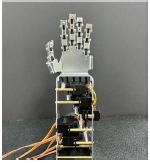
TJPG 성능평가: Table 11는 TJPG 집기 동작의 성능평가결과를 나타낸 것이다. TJPG는 TTPG와 동일하게 thumb 손끝의 윗부분과 index 손끝이 맞닿으며 thumb 위에 index가 올라가며, middle이 굽혀졌다. 캡 유형과 RE 스트립 모두 동일한 결과로 확인하였다. 카드 유형별 집기 성능평가 또한 card 1 및 card 2를 모두 안정적으로 집는 동작이 가능한 것으로 나타났다.
Performance evaluation of motion control of fingers for TTPG
4. 결 론
본 연구에서는 스마트 장갑용 3D 프린팅 손가락 모형의 동작 제어 시스템을 개발하고 동작 기능성에 대한 기초 연구를 진행하였다. 손가락 동작 제어 시스템 모듈 재료로 시스템을 조립하고, 네 가지 동작으로 프로그래밍하였다. 이에 적용할 3D 프린팅 손가락을 캡과 RE 스트립의 두 유형으로 모델링 후 TPU 및 TPE 2가지 재료로 제조하였다. 제조된 3D 프린팅 손가락 동작 제어 시스템은 각 동작별로 성능평가를 하였다. 결과는 다음과 같이 요약할 수 있다.
1. 손가락 동작 제어 시스템은 컨트롤러 UNO 보드로 제어하였으며, 서보모터는 보드의 3, 5, 6, 9, 및 10번에 연결하였다. 제조된 손가락 동작 제어 시스템은 CG, SG, TTPG, TJPG 네 가지 동작으로 프로그래밍하였다. 초기상태는 손가락이 90°로 제어되었다. CG 동작은 서보모터 1∼3번은 0o 및 서보모터 4~5번은 180o로 제어하고, SG 동작은 0o 및 150o로 제어하였다. TTPG 동작은 서보모터 1과 2번을 각각 30o와 0o, TJPG 동작은 서보모터 1~3번을 각각 30o, 0o, 0o로 제어하여 프로그래밍하였다.
2. 손가락 동작 제어 시스템에 적용할 3D 프린팅 손가락 제조를 위해 캡 유형과 RE 스트립 유형 두 가지 모델링을 하여, FDM 3D 프린팅 기법을 통해 TPU 및 TPE 두가지 소재로 제조하였다.
3. 손가락 동작 제어 시스템 성능평가 결과로, Cap-TPU는 두께로 인해 잡기 동작 시 굽혀진 손가락의 각도가 일자로 나타났으며, Cap-TPE는 사선으로 확인되었다. RE 스트립 유형은 잡기 동작 시, 손가락의 각도가 모두 사선이며 약지와 검지는 완전히 굽혀졌다. 따라서, TPE 소재와 RE 스트립 유형이 3D 프린팅 손가락 조건에 적합한 것으로 확인하였다. 물체별 성능 평가 결과로, CG 동작은 직경 15 mm 이상 조건의 펜 유형을 잡는 동작이 가능한 것을 확인하였다. SG 동작은 지름 40 mm 조건의 공 유형은 잡기 동작이 가능하였으나, 무게가 40 g의 공은 동작이 불가능하였다. TTPG 동작과 TJPG 동작은 두 가지 소재의 카드 유형을 집는 동작이 모두 가능한 것으로 확인하였다.
따라서, 3D 프린팅 손가락 모형의 동작 제어 시스템은 원통형 잡기, 구형 잡기, 두 손가락 집기, 세 손가락 집기 동작이 모두 구현가능하였다. TPE 소재로 출력한 3D 프린팅 손가락 모형이 TPU 소재로 출력한 3D 프린팅 손가락 모형보다 잡기 동작성이 적합하였다. 또한, RE 스트립 유형의 손가락 모형이 캡 유형의 손가락 모형보다 잡기 동작에 적합한 것으로 확인하였다. 후속 연구로는 3D 프린팅 손가락 모형의 동작 제어 시스템에서 3D 프린팅 손가락 모형의 움직임 각도, 잡기 동작 시 3D 프린팅 손가락 모형의 압력과 집기력 등의 정량적 평가를 진행하고자 한다.
Acknowledgments
본 연구는 정부(과학기술정보통신부)의 재원으로 한국연구재단의 지원을 받아 수행된 연구임(NRF-2021R1A4A1022059).
References
-
Bae, Y. J. (2018). A Study on development trends, types and characteristics of smart gloves. Journal of Fashion Design, 18(1), 157-173.
[https://doi.org/10.18652/2018.18.1.10]

- ‘CyberGlove II’. (2009). CyberGlove. Retrieved May 20, 2022, from https://www.cyberglovesystems.com
-
Eom, R., & Lee, Y. (2020a). Comfort evaluation by wearing a gaitassistive rehabilitation robot. Journal of the Korean Society of Clothing and Textiles, 44(6), 1107-1119.
[https://doi.org/10.5850/JKSCT.2020.44.6.1107]
-
Eom, R., & Lee, Y. (2020b). Investigation of development direction for wearable robot based on soldier's work status. Journal of the Korean Society of Clothing and Textiles. 44(6), 1178-1188.
[https://doi.org/10.5850/JKSCT.2020.44.6.1178]
- ‘E-textiles 2020-2030 - Technologies, markets and players’. (2017). IDtechEx. Retrieved June 8, 2022, from https://www.idtechex.com/en/research-report/e-textiles-and-smart-clothing-2020-2030-technologies-markets-and-players/735
- ‘Gloreha’. (2008). Gloreha. Retrieved May 20, 2022, from https://www.gloreha.com
-
Jung, I., Shin, E., & Lee, S. (2022). Morphological characteristics according to the 3D printing extrusion temperature of TPU filaments for different hardnesses. Textile Science and Engineering, 59(1), 36-46.
[https://doi.org/10.12772/TSE.2022.59.036]
-
Kabir, S., Kim, H., & Lee, S. (2020). Physical property of 3D-printed sinusoidal pattern using shape memory TPU filament. Textile Research Journal, 90(21-22), 2399-2410.
[https://doi.org/10.1177/0040517520919750]
-
Kang, B. B., Choi, H., Lee, H., & Cho, K. J. (2018). Exo-Glove Poly II - A polymer-based soft wearable robot for the hand with a tendon-driven actuation system. Soft Robotics. 6(2), 214-227.
[https://doi.org/10.1089/soro.2018.0006]
-
Kim, H. S., Koo, D. S., Nam, Y. J., Cho, K., & Kim, S. (2019). Research on technology status and development direction of wearable robot. Fashion & Textile Research Journal, 21(5), 640-555.
[https://doi.org/10.5805/SFTI.2019.21.5.640]
-
Kim, H., & Lee, S. (2020). Mechanical properties of 3D printed reentrant pattern with various hardness types of TPU filament manufactured through FDM 3D printing. Textile Science and Engineering, 57(3), 166-176.
[https://doi.org/10.12772/TSE.2020.57.166]
-
Koo, D. S., & Lee, J. R. (2017). The development of a wrist brace using 3D scanner and 3D printer. Fashion & Textile Research Journal, 19(3), 312-319.
[https://doi.org/10.5805/SFTI.2017.19.3.312]
-
Lee, K. S., & Jung, M. C. (2016). Three-dimensional finger joint angles by hand posture and object properties. Ergonomics, 59(7), 890-900.
[https://doi.org/10.1080/00140139.2015.1108458]
- Lee, S. H. (2020, 5). <CES 2020>를 통해 본 소비자가전 주요산업 동향-바이오헬스분야 [Trends of major consumer electronics industries through <CES 2020> - Bio-health sector]. PD ISSUE REPORT 20, pp. 73-78.
- Lee, S. M. (2019). Analysis of hand forces and surface changes based on pinch postures of elderly women and women in their 20s. Unpublished master’s thesis, Seoul National University, Korea.
-
Lee, S., Landers, K., & Park, H. (2014). Development of a biomimetic hand exotendon device (BiomHED) for restoration of functional hand movement post-stroke. IEEE Transactions on Neural Systems and Rehabilitation Engineering. 22(4), 886-898.
[https://doi.org/10.1109/TNSRE.2014.2298362]
-
Mohammadi, A., Lavranos, J., Choong, P., & Oetomo, D. (2018, July). Flexo-glove - A 3D printed soft exoskeleton robotic glove for impaired hand rehabilitation and assistance. 2018 40th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC) (pp. 2120-2123). Honolulu, HI, USA:IEEE.
[https://doi.org/10.1109/EMBC.2018.8512617]
-
Ng, P. K., Bee, M. C., Saptari A., & Mohamad, N. A. (2014) A review of different pinch techniques, Theoretical Issues in Ergonomics Science, 15(5), 517-533.
[https://doi.org/10.1080/1463922X.2013.796539]
-
Ochoa, J. M., Jia, Y., Narasimhan, D., & Kamper, D. G. (2009, September). Development of a portable actuated orthotic glove to facilitate gross extension of the digits for therapeutic training after stroke. 2009 Annual International Conference of the IEEE Engineering in Medicine and Biology Society (pp. 6918-6921). Minneapolis, MN, USA:IEEE.
[https://doi.org/10.1109/IEMBS.2009.5333630]
- Park, H. S., & Kim, D. H. (2016). 손재활을 위한 소프트 웨어러블 로봇재활 장치 [Software wearable robot rehabilitation device for hand rehabilitation], Korea Robotics Society Review, 13(2), 38-43.
- Park, S. J. (2019, 11). 국내외 스마트 의류 개발 및 상용화 동향 [Trends in domestic and overseas smart clothing development and commercialization]. Weekly KDB Report, pp. 4-7.
- ‘Rafael’. (2014). Neofect. Retrieved May 20, 2022, from https://www.neofect.com
- ‘SEM-Glove’. (2011). Bioservo. Retrieved May 20, 2022, from https://www.bioservo.com/healthcare
- ‘Smart clothing market-global forecast to 2024’. (2019, November 19), Markets and Markets. Retrieved May 21, 2022, from https://www.marketsandmarkets.com/Market-Reports/smart-clothingmarket-56415040.html
- ‘Syrebo’. (2018). Syrebo. Retrieved May 20, 2022, from https://www.syrebo.com
- ‘Wearable technology forecasts 2020-2030’. (2019). IDtechEx. Retrieved June 7, 2022, from https://www.idtechex.com/en/research-report/wearable-technology-forecasts-2020-2030/747
-
Xing, L., Wang, M., Zhang, J., Chen, X., & Ye, X. (2020, June). A survey on flexible exoskeleton robot. 2020 IEEE 4th Information Technology, Networking, Electronic and Automation Control Conference (pp. 170-174). Chongqing, China: IEEE.
[https://doi.org/10.1109/ITNEC48623.2020.9084920]